1.多目标遮挡跟踪 |


|
 视频下载 演示本系统的多目标遮挡跟踪技术。互遮挡现象是复杂场景下运动对象跟踪中常见的问题,也是影响系统能否准确有效工作的重点和难点内容之一。本系统利用自主开发的技术较好地处理了互遮挡跟踪问题。演示共分四个场景。场景一演示室外交通场景下位置互相靠近且外观一致的车辆的准确跟踪。相应场景在中关村东路实时拍摄,场景内出现两辆黑色轿车并行,互相影响,本系统可以保持对两车分别准确跟踪,直至两车分开。场景二演示室外运动对象交错时的跟踪。相应场景在西格玛大厦前停车场拍摄。场景内多次出现行人和车,行人和行人之间的交错,本系统可以准确保持对相应对象的跟踪。场景三也是演示室外运动对象交错时的跟踪。相应场景在某教学大楼前拍摄。场景内多次出现行人和自行车,行人和行人之间的交错,本系统能够准确保持对相应对象的标定。场景四是演示室内人互遮挡运动时的跟踪。相应场景在实验室房间拍摄。场景内两个人互相交错行走,多次互相遮挡,遮挡时间也较长,本系统同样可以准确保持对两个人的准确标定。 视频下载 演示本系统的多目标遮挡跟踪技术。互遮挡现象是复杂场景下运动对象跟踪中常见的问题,也是影响系统能否准确有效工作的重点和难点内容之一。本系统利用自主开发的技术较好地处理了互遮挡跟踪问题。演示共分四个场景。场景一演示室外交通场景下位置互相靠近且外观一致的车辆的准确跟踪。相应场景在中关村东路实时拍摄,场景内出现两辆黑色轿车并行,互相影响,本系统可以保持对两车分别准确跟踪,直至两车分开。场景二演示室外运动对象交错时的跟踪。相应场景在西格玛大厦前停车场拍摄。场景内多次出现行人和车,行人和行人之间的交错,本系统可以准确保持对相应对象的跟踪。场景三也是演示室外运动对象交错时的跟踪。相应场景在某教学大楼前拍摄。场景内多次出现行人和自行车,行人和行人之间的交错,本系统能够准确保持对相应对象的标定。场景四是演示室内人互遮挡运动时的跟踪。相应场景在实验室房间拍摄。场景内两个人互相交错行走,多次互相遮挡,遮挡时间也较长,本系统同样可以准确保持对两个人的准确标定。
|
|
2.目标检测、跟踪、与分类 |

|
视频下载 演示本系统的自动目标检测、跟踪和识别分类功能。该功能建立在目标提取和跟踪的基础上,能够实时对运动目标的类型进行自动准确识别。系统首先采用背景减除的方法进行运动物体的检测,然后进行跟踪,记录各个物体的运动轨迹(在视频中标出)和运动信息(包括大小,速率,方向等)。在获取这些信息的基础上,系统对每个运动对象进行识别,在其旁边标出相应的类别字母。根据监控场景的实际需要,系统将场景中的目标分为六大类:单人、群人、自行车、小轿车、面包车和卡车。 本系统在白天普通气候条件下,室外运动目标识别的准确率可以达到80%以上。这项技术的特点是与摄像机视角、目标姿态无关,并能实现实时检测、实时跟踪和实时分类。 |
|
3 .异常动作检测 |

|
视频下载 与目标异常行为分析不同,人体异常动作识别与报警主要关注人的异常动作。比如,蹬踢、移动重要的公用设施、乱写乱画等。 在研制该技术的过程中,我们突破了传统的做法,另开新路,达到国际领先水平。该项技术与视角无关,与场景无关,与人的图像大小无关 , 运行实时鲁棒。当系统发现人的异常动作时, 系统在其周围给出报警信息,并进行报警。 |
|
|
4 . 人异常行为检测与报警 |
  
|
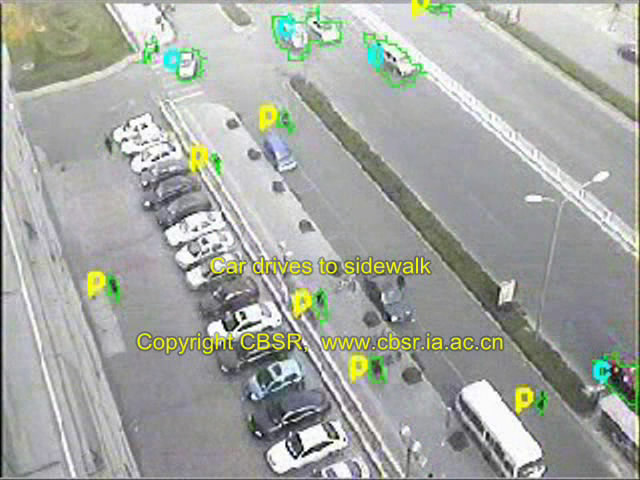
视频下载 演示本系统人行为异常报警的功能。系统在实时鲁棒的运动检测、跟踪和识别的基础上,对物体的运动信息进行进一步分析,实现了人异常行为的识别与报警。该演示场景在中科院自动化研究所停车场入口处实地拍摄。画面左侧上方显示监控场景及处理结果,下方是实时提取的背景画面。系统首先通过背景减除提取运动对象并进行跟踪和目标类型识别。当有一个人靠近事先划定的禁区(花圃)时,系统自动在该人周围打出红色问号,开始是一个,然后是两个。当该人真的翻越栏杆进入花圃时,系统在其周围打出两个惊叹号,并发出报警声,表示该人的行为异常。同时,系统将该人的局部场景图象单独显示在画面的右上方,使管理人员可以作近距离观测和判断。 |
|
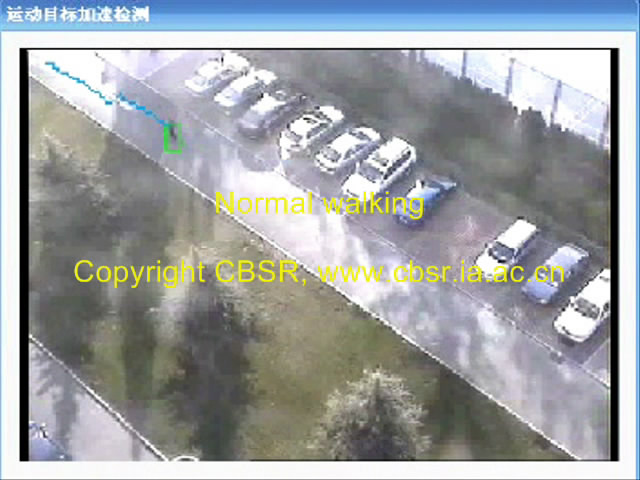
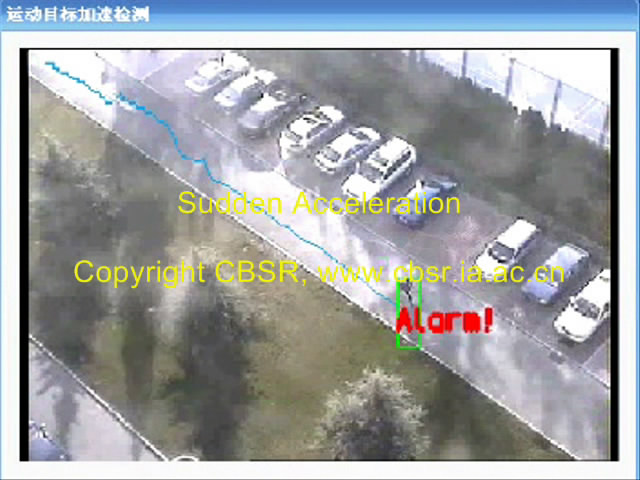
视频下载 该视频主要演示本系统的异常加速报警功能。在一些应用场合中,运动目标的异常加速行为是需要加以注意的,对其准确检测可以作为交通违章,闯越禁区等异常事件判断的依据。该演示的场景为自动化所园区,一个行人正常步入场景一段时间后突然加速奔跑前进,我们将该行为定义加速异常。系统利用运动检测和跟踪提供的速度,加速度,轨迹等信息,准确地检测到该加速异常,并在其周围显示相关报警信息。 |
|
6 .交通车辆计数演示 |
|
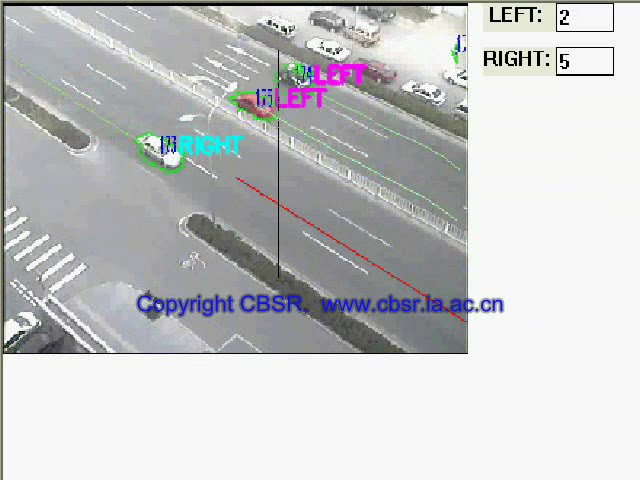
视频下载 演示本智能监控系统的交通车辆计数功能。屏幕左方大区域为监控场景,屏幕右上方为左右两车道的计数结果。该演示场景为中关村东路实地拍摄。系统首先采用背景减除技术进行运动车辆的检测和跟踪,进而记录车辆的行驶轨迹。在此基础上,根据定义的坐标系统,结合运动轨迹就可以判断出车辆的行驶方向。在计数时,我们只关心马路主干道上的车辆数目,在图像中的相应位置画出一条基准线。当车辆自左向右通过该基准线时,右上方的 LEFT 计数框自动增加一。车辆自右向左通过基准线时道理相同。在白天、普通天气以及车辆正常行驶的情况下,该系统可以达到 90% 以上的计数准确性。 |
|
7 .主从摄像机跟踪 |
|
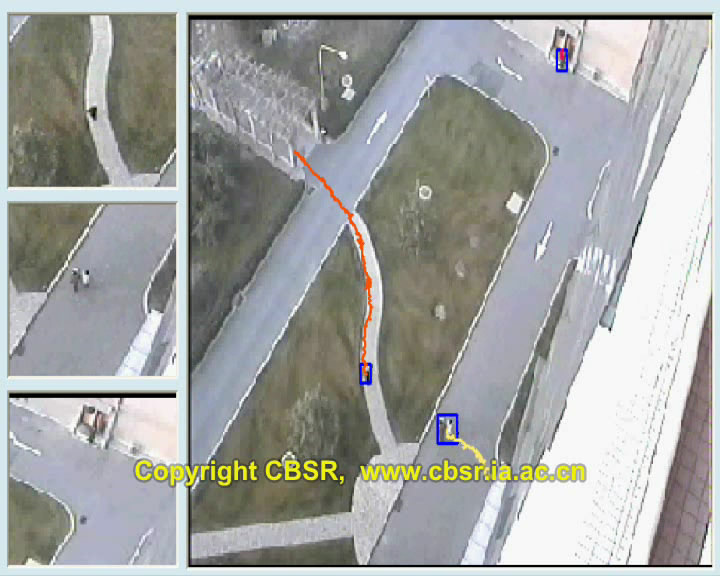
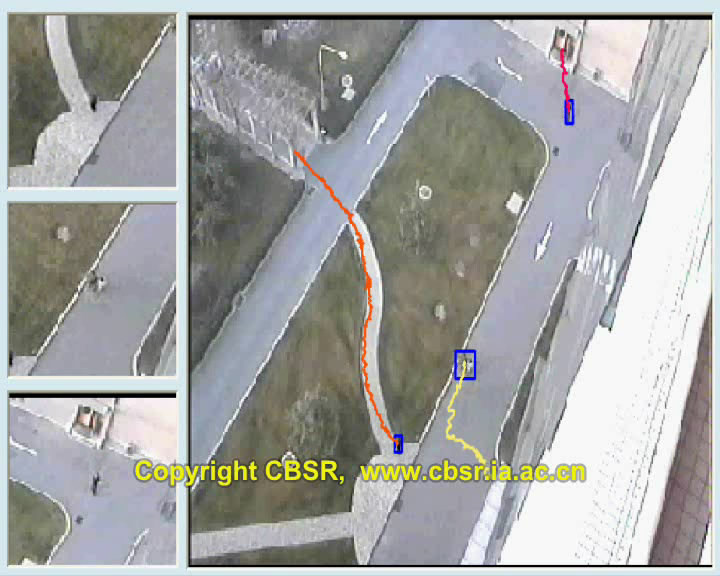
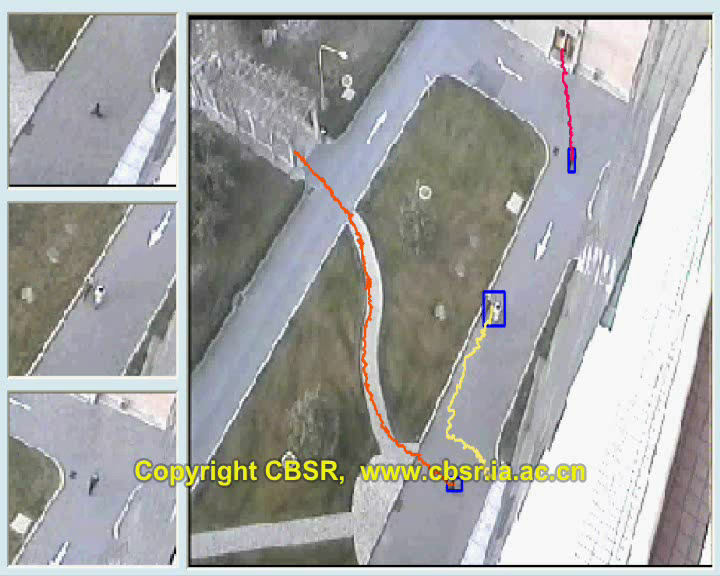
视频下载 演示本系统的主从跟踪技术。在本系统采用一种利用单个摄像机实现主从跟踪的方法,通过一个高分辨率摄像机,采用主从结构进行视频跟踪。通过对高分辨率摄像机捕捉到的信号的高效利用,对人和车辆的细节作高分辨率的跟踪与观测,以进一步细致地分析与判断。该演示场景在自动化所园区内实地拍摄,画面右侧是高清晰度全景,画面左侧从上到下列出三个放大的局部场景。系统首先检测出全景里的运动对象并进行跟踪,相应轨迹显示在全景画面里。同时自动根据标号大小,或者由用户指定,系统在局部场景画面中放大显示三个目前正在被跟踪的运动对象(不足三个则相应画面全黑),以便用户作出细致观察和判断。该技术的优点在于,利用软件实现局部对象跟踪,选择多个对象进行局部跟踪与选择一个对象相比,其计算开销是基本不变的,克服了传统主从摄像机方案开销大和难以控制的缺陷,并且系统集成度高,制造成本低,安装、维护方便且自动化程度高。 |
|
8.多摄像机数据融合(全景监控地图) |
|
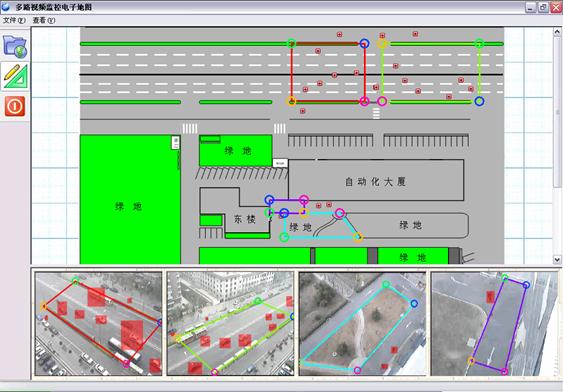
视频下载 本系统的全局监控电子地图功能。本系统采用全景监控地图的形式将在分布在场景中不同区域的摄像机采集和分析得到的运动对象信息及时地显示在二维全景监控地图上,解决了多摄像机信息融合问题,使得监控工作人员对全局有清晰的把握。演示场景是中科院自动化研究所园区四周。画面左侧区域显示的是全局二维电子地图,右侧是两路场景(园区和停车场)视频。每路场景分别进行运动检测和跟踪,得到的对象位置信息通过一定的几何变换投影到电子地图上。地图上的红点是停车场上运动物体,蓝点是园区内的运动物体。同时,两路场景中的运动对象的局部场景分别显示在画面右下方的两个小窗口中,方便用户进行近距离的观测和判断。该全局电子地图功能的实现大大提高了系统的信息融合能力。 |
|
9 .交通拥堵检测与报警 |
|
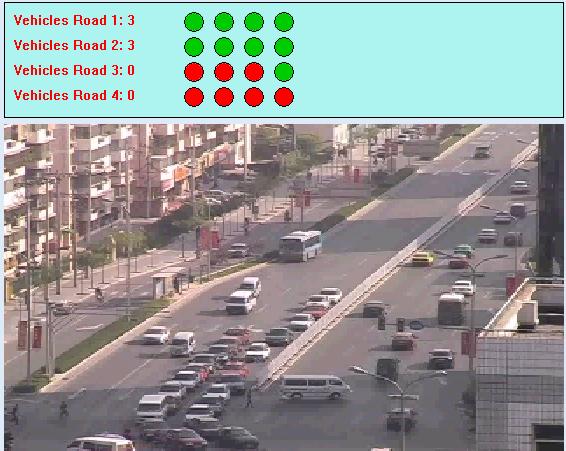
视频下载 演示本系统的多车道车辆计数和拥塞分析功能。画面分上下两块,下方是视频场景,上方是实时的结果显示,其中左边是车辆计数结果,右边是拥塞分析的结果。该场景在大钟寺路口实地拍摄。本演示针对场景中的四个主要车道上行使的车辆进行统计,数目显示在对应窗体中。根据各车道的计数结果,结合对车辆行驶速度的估计,可以检测出当前的拥塞状况。开始时,各个车道都比较通畅,车辆没有堵塞的现象,系统作出判断,显示相应的圆圈均为绿色。一段时间以后,车道一开始拥塞,随着程度的不断增加,对应的显示圆圈开始一个一个变红,直至四个圆圈全部变红。当拥塞状况出现缓解时,红色圈又逐渐变回绿色。其它车道的处理过程类似。在白天、普通天气以及车辆正常行驶的情况下,该系统可以达到 90% 以上的计数准确性,对拥塞判断也比较符合实际情况。 |
|
10 .车辆异常行为检测与报警 |
|
视频下载 演示本系统车辆行驶行为异常报警的功能。系统在实时鲁棒的运动检测、跟踪和识别的基础上,对物体的运动信息进行进一步分析,实现了车辆非正常行驶的识别与报警。该演示场景在中科院自动化研究所停车场实地拍摄。系统首先通过背景减除提取运动对象并进行跟踪和目标类型识别。当有一辆白车驶上人行道时,系统自动在该车周围打出两个红色问号,并发出警报声,表示其可能有行驶有异常,需要引起管理人员的注意。当车辆退出人行道的后,问号消失,警报解除。再过一段时间,有一辆黑色的汽车快速在停车场上逆行,系统在其周围打出了两个红色惊叹号,并发出警报声,表示其行驶行为已经发生异常。该报警功能的实现,可以在无人工巡视的条件下自动检测车辆违章行驶,实现高效智能的交通管理。 |
|
11 .夜间跟踪演示 |
|
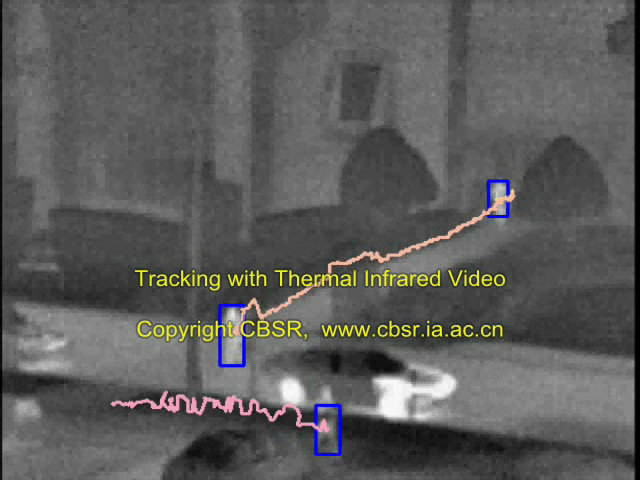
视频下载 演示本系统夜间跟踪功能。夜间运动对象检测与跟踪是鲁棒的智能监控系统的基本要求之一,也是技术难点之一。本系统采用相关成果,较好的解决了这个难点问题。演示包括三个场景。场景一是夜间拍摄的中科院自动化所模式教学楼前区域。该场景中,有一个人从大楼里面走出来,另外一个人在大楼前跑步。在较低的对比度下,系统仍然准确地检测出这两个运动对象,并保持正确的跟踪。场景二是夜间拍摄的中关村东路路面。该场景下,车辆的灯光将对监控产生一定的干扰,然而本系统同样能够准确地检测出车辆并实现鲁棒的跟踪。以上场景都是由可见光摄像机拍摄,场景三则是近红外摄像机拍摄的夜间园区。可以看出本系统开发的检测和跟踪技术同样可以适用于这种场景,具有较高的实时性和准确性。 |
|
12 .动态场景下的主动跟踪 |
  
|
视频下载 演示本系统的动态场景下主动跟踪功能。该演示包括三个场景。场景一是一架战斗机在空中进行高速特技飞行,跟踪的目标是这架飞机。图像的分辨率比较低,目标和背景的对比度也比较低,这些都不利于主动跟踪的实现。 针对这些难点,我们的跟踪算法可以提取出目标区别于背景的关键特征,因而可以自始至终准确地锁定飞机。场景二是一架直升飞机在空中盘旋,跟踪的目标是这架飞机。和场景一类似,该场景也存在分辨率,对比度低的问题,我们的算法可以鲁棒地对飞机进行锁定跟踪。场景三是 PETS2005 提供的一个测试序列,涉及动态场景下的目标跟踪问题,具有一定的挑战性。跟踪的目标是水上的移动目标,低分辨率,低对比度以及海面的波涛对跟踪干扰很大。我们算法则克服这些难点,很好的解决了对该目标的准确跟踪,用十字框实时准确地标出目标位置,并给出其运动轨迹。 |
|
13 .视频图像序列拼接 |
  
|
视频下载 演示本系统 对图像与视频序列的全景拼接功能,将对周围环境连续拍摄的图像视频序列拼接成全景图像。 |
|
14 .人数统计 |
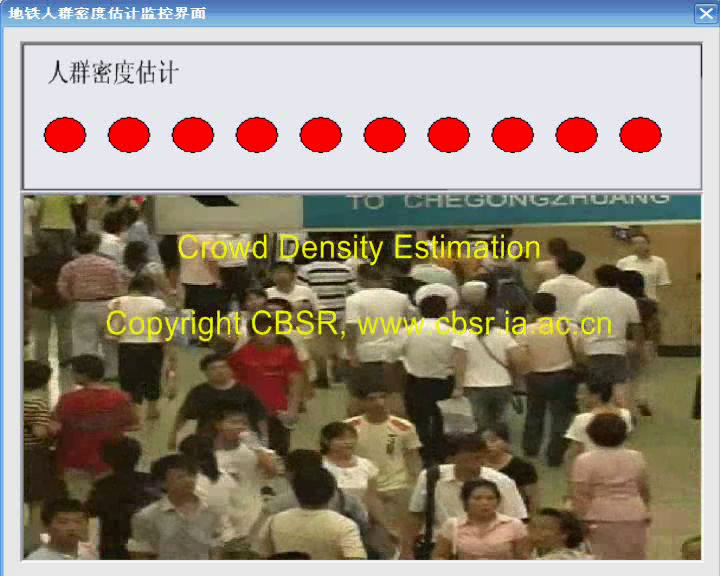 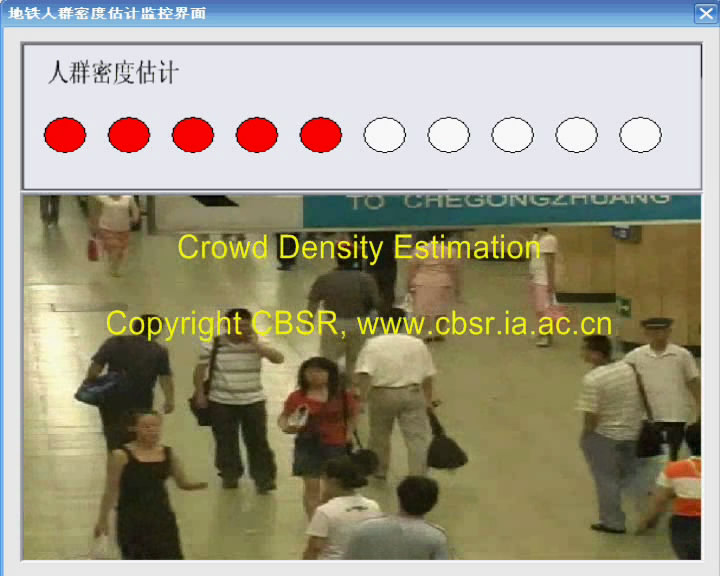  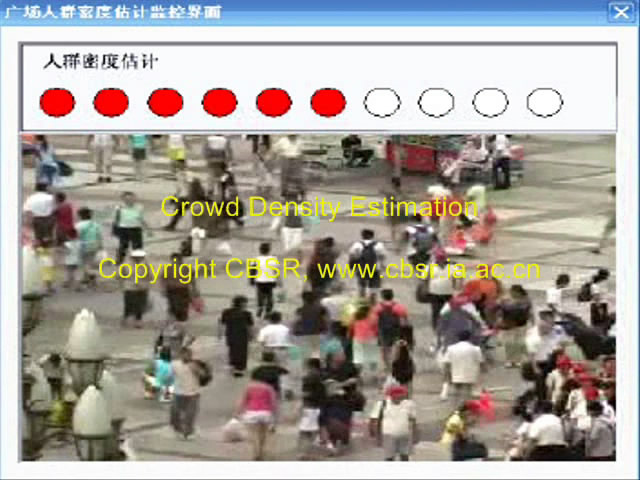 |
| 视频下载1 视频下载2 该视频主要演示本系统的人群密度估计功能。公共场所的人群密度估计是安全监控的一个重要方面,对于协助交通管理,异常行为的报警等具有非常实际的意义。该演示包括两个场景,每个场景都是将人群密度分为 10 个等级来进行估计,并以红色圈标记,红圈越多表示人群密度越大。场景一是地铁序列( RGB , 640x480, 4 min 30 sec ,摄像机固定)在地铁西直门站采集,记录了列车进站前站台人比较少到列车进站下车时人群拥挤到列车离开后人群逐渐散去的过程。场景二是火车站广场序列( RGB , 640x480, 2 min 20 sec ,摄像机固定)在北京站南广场采集,系统能够比较准确地估计出广场上人群密度的变化情况。该人群密度估计系统平均处理速度约 10 帧 / 秒,能够满足实时处理的要求。 |
视频下载 CBSR人数统计(垂直摄像头,双向) |
打包下载CBSR人数统计(垂直摄像头,双向) |
|
15 .视频浓缩 |
视频下载 原始视频 1小时53分29秒 采样 |
视频下载 浓缩视频 0小时5分53秒 |
| |

