|

Face Recognition and Intelligent Surveillance
|
|
1.
AuthenMetric-F1: Near
Infrared Based Face Recognition System
|
|
  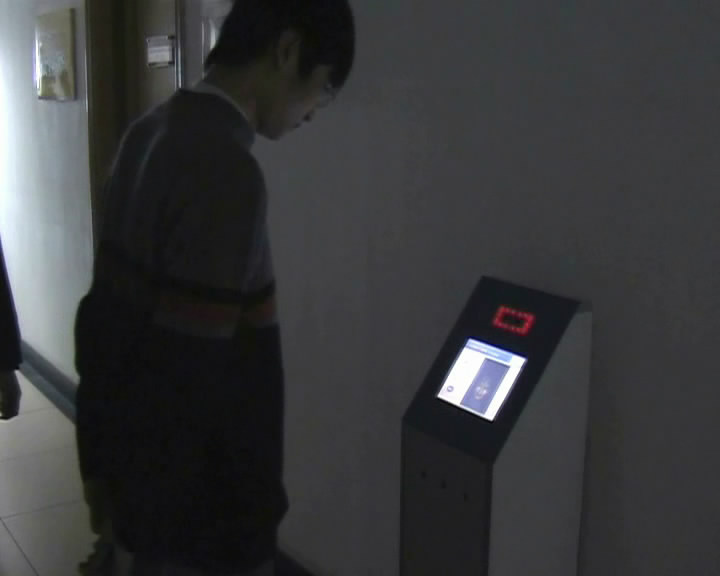
AuthenMetric Client Systems in Operation, working under
Normal Lighting and in Darkness
|
|
 video1,
video2
AuthenMetric F1 is a highly reliable face recognition system. It consists of
innovative hardware and software. The
cutting-edge face recognition technology
overcomes a major obstacle that limits performance of
existing commercial systems, i.e. that of lighting variation. AuthenMetric
F1 not only achieves higher recognition accuracy than any existing face and
fingerprint recognition systems but is also fast, and can provide liveliness detection
against fakes. In the testing scenarios in this demo, every enrolled
participant spoke his name to the camera, and then turned to the system; the
system identified (1 out of about 1000) his face and pronounced his name
through a loudspeaker (the same as spoken by the participant). An
un-enrolled
participant
(female) was rejected by the
system. She was enrolled then and identified successfully by the system. The
final part of the demo shows accurate and fast identification in a dark
lighting condition.
AuthenMetric
on ARM9 video1,
video2
AuthenMetric F1 is a highly reliable face recognition system. It consists of
innovative hardware and software. The
cutting-edge face recognition technology
overcomes a major obstacle that limits performance of
existing commercial systems, i.e. that of lighting variation. AuthenMetric
F1 not only achieves higher recognition accuracy than any existing face and
fingerprint recognition systems but is also fast, and can provide liveliness detection
against fakes. In the testing scenarios in this demo, every enrolled
participant spoke his name to the camera, and then turned to the system; the
system identified (1 out of about 1000) his face and pronounced his name
through a loudspeaker (the same as spoken by the participant). An
un-enrolled
participant
(female) was rejected by the
system. She was enrolled then and identified successfully by the system. The
final part of the demo shows accurate and fast identification in a dark
lighting condition.
AuthenMetric
on ARM9
|
|
|
|
2. Face
Detection and Tracking
|
|

|
|
video 演示本系统的准确、稳定、实时和流畅的人脸跟踪关键技术。现有人脸跟踪技术基于肤色或表象,在侧脸或脸部被遮挡等情况下,往往跟踪丢失,这是需要解决的一个问题。这项关键技术可以在复杂环境下,采用普通摄像头(静止或者运动)对人脸进行实时准确地检测和跟踪。演示分三个部分,每一部分绿色十字框表示人脸检测的结果,红色十字框表示切换到人脸跟踪模块。第一部分是固定摄像机下多姿态以及跳跃状态下的人脸检测和跟踪,相应场景为普通房间内。单个人进入场景,以很大的角度上下左右不断改变脸的姿态,同时身体也有快速的跳跃。在这些复杂条件下,系统能够保持对人脸的跟踪,进行了相应的标定。第二部分是固定摄像机下多个人脸的检测与跟踪,相应场景为普通房间内。开始是一个人,然后增加到两个,最后是四个,系统可以自动准确地检测出这些人脸,并保持跟踪。第三部分是主动摄像机对人脸检测和跟踪。相应场景为普通房间内。一个人进入场景,系统检测出人脸,主动摄像机锁定人脸,在其运动过程中保持跟踪,直至该人离开房间。
|
|
|
|
3. Moving
Object Detection Tracking and Classification
|
|
|
|
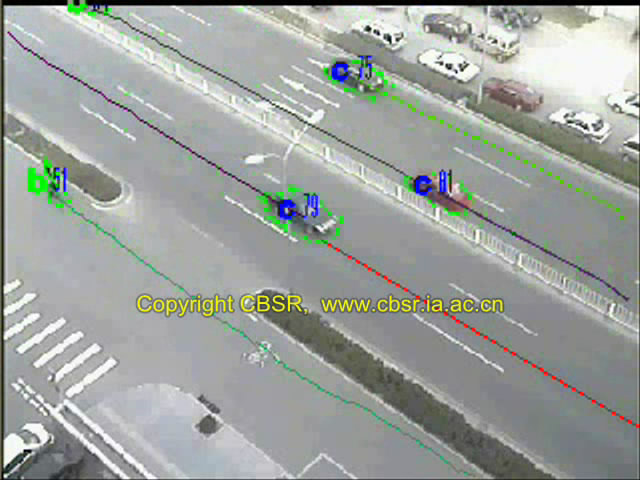
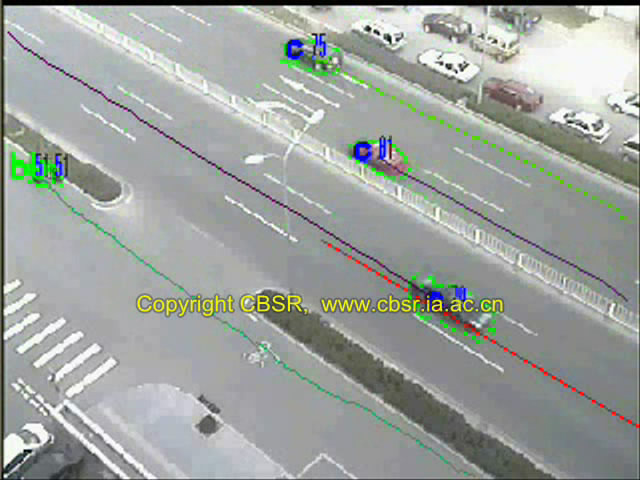
video 演示本系统的自动目标检测、跟踪和识别分类功能。该功能建立在目标提取和跟踪的基础上,能够实时对运动目标的类型进行自动准确识别。相应场景为条件下实地拍摄的中关村东路路面。系统首先采用背景减除的方法进行运动物体的检测,然后进行跟踪,记录各个物体的运动轨迹(在视频中标出)和运动信息(包括大小,速率,方向等)。在获取这些信息的基础上,系统对每个运动对象进行识别,在其旁边标出相应的类别字母。根据监控场景的实际需要,系统将场景中的目标分为三大类:汽车,自行车和行人。
其中汽车用字母c(car)表示,自行车用字母b(bicycle)表示,行人用字母p(pedestrian)
表示。本系统在白天普通气候条件下,室外运动目标识别的准确率可以达到80%以上。
|
|
|
|
4.
Tracking Multiple Targets Under Occlusion
|
|


|
|
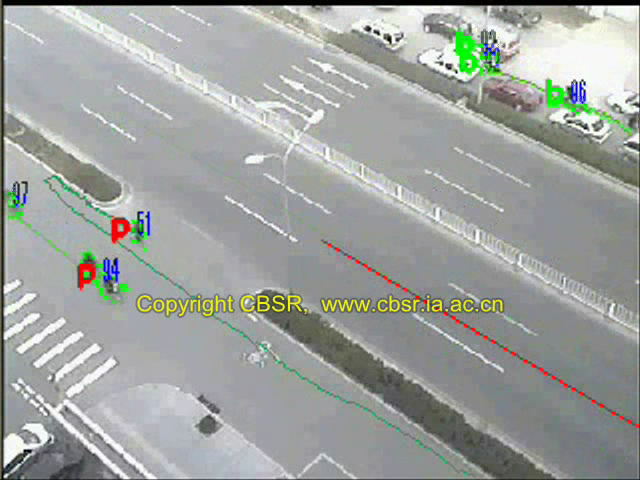
video 演示本系统的多目标遮挡跟踪技术。互遮挡现象是复杂场景下运动对象跟踪中常见的问题,也是影响系统能否准确有效工作的重点和难点内容之一。本系统利用自主开发的技术较好地处理了互遮挡跟踪问题。演示共分四个场景。场景一演示室外交通场景下位置互相靠近且外观一致的车辆的准确跟踪。相应场景在中关村东路实时拍摄,场景内出现两辆黑色轿车并行,互相影响,本系统可以保持对两车分别准确跟踪,直至两车分开。场景二演示室外运动对象交错时的跟踪。相应场景在西格玛大厦前停车场拍摄。场景内多次出现行人和车,行人和行人之间的交错,本系统可以准确保持对相应对象的跟踪。场景三也是演示室外运动对象交错时的跟踪。相应场景在某教学大楼前拍摄。场景内多次出现行人和自行车,行人和行人之间的交错,本系统能够准确保持对相应对象的标定。场景四是演示室内人互遮挡运动时的跟踪。相应场景在实验室房间拍摄。场景内两个人互相交错行走,多次互相遮挡,遮挡时间也较长,本系统同样可以准确保持对两个人的准确标定。
|
|
|
|
5.Vehicle
Counting in Traffic Surveillance
|
|
|
|
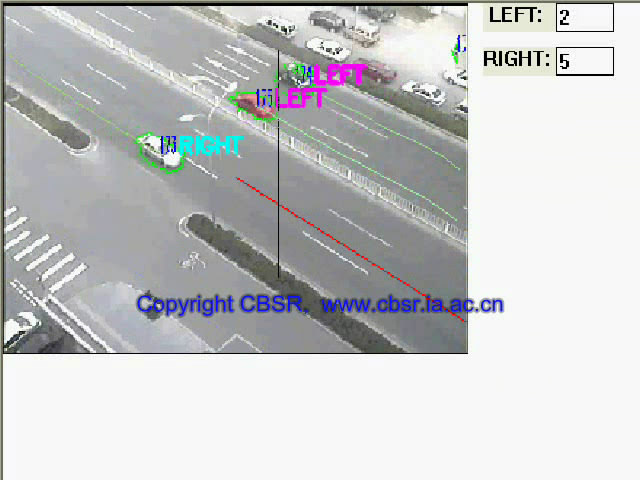
video 演示本智能监控系统的交通车辆计数功能。屏幕左方大区域为监控场景,屏幕右上方为左右两车道的计数结果。该演示场景为中关村东路实地拍摄。系统首先采用背景减除技术进行运动车辆的检测和跟踪,进而记录车辆的行驶轨迹。在此基础上,根据定义的坐标系统,结合运动轨迹就可以判断出车辆的行驶方向。在计数时,我们只关心马路主干道上的车辆数目,在图像中的相应位置画出一条基准线。当车辆自左向右通过该基准线时,右上方的LEFT计数框自动增加一。车辆自右向左通过基准线时道理相同。在白天、普通天气以及车辆正常行驶的情况下,该系统可以达到90%以上的计数准确性。
|
|
|
|
6.Master-Slave
Tracking
|
|
|
|
video演示本系统的主从跟踪技术。在本系统采用一种利用单个摄像机实现主从跟踪的方法,通过一个高分辨率摄像机,采用主从结构进行视频跟踪。通过对高分辨率摄像机捕捉到的信号的高效利用,对人和车辆的细节作高分辨率的跟踪与观测,以进一步细致地分析与判断。该演示场景在自动化所园区内实地拍摄,画面右侧是高清晰度全景,画面左侧从上到下列出三个放大的局部场景。系统首先检测出全景里的运动对象并进行跟踪,相应轨迹显示在全景画面里。同时自动根据标号大小,或者由用户指定,系统在局部场景画面中放大显示三个目前正在被跟踪的运动对象(不足三个则相应画面全黑),以便用户作出细致观察和判断。该技术的优点在于,利用软件实现局部对象跟踪,选择多个对象进行局部跟踪与选择一个对象相比,其计算开销是基本不变的,克服了传统主从摄像机方案开销大和难以控制的缺陷,并且系统集成度高,制造成本低,安装、维护方便且自动化程度高。
|
|
|
|
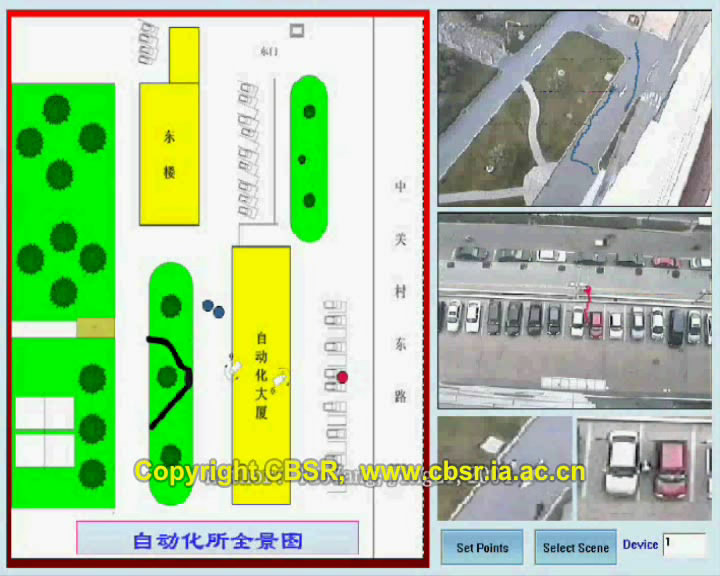
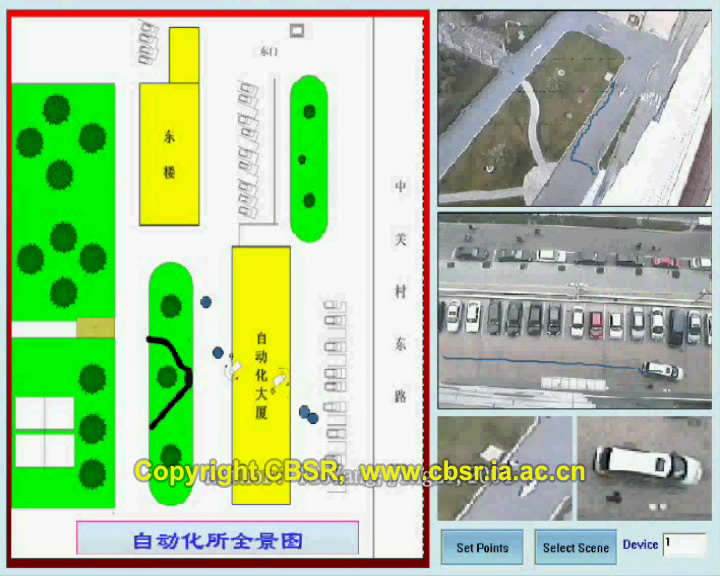
7.Overview
Surveillance Map (Multi-Camera Fusion)
|
|
|
|
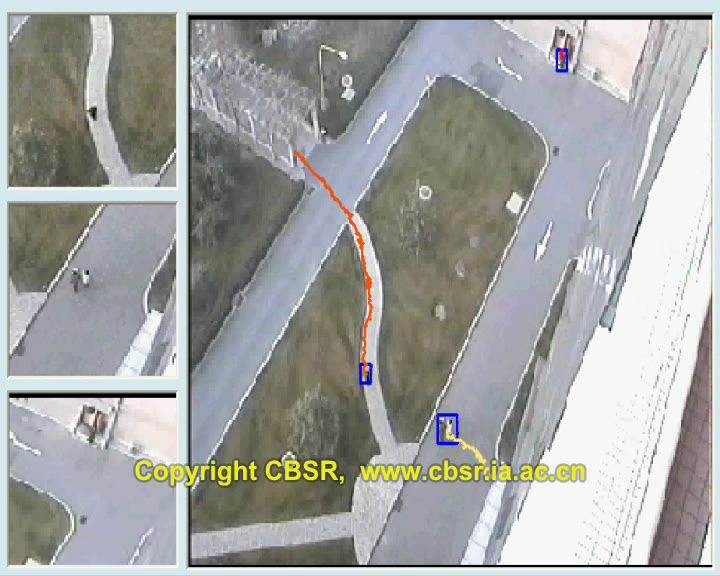
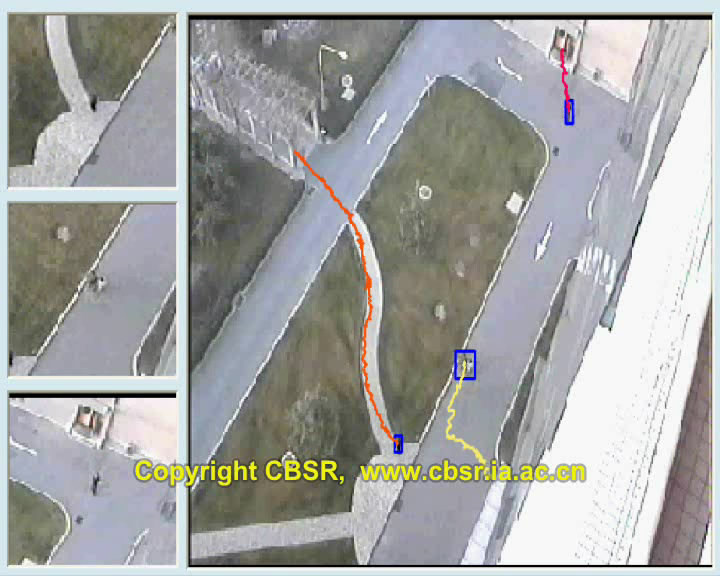
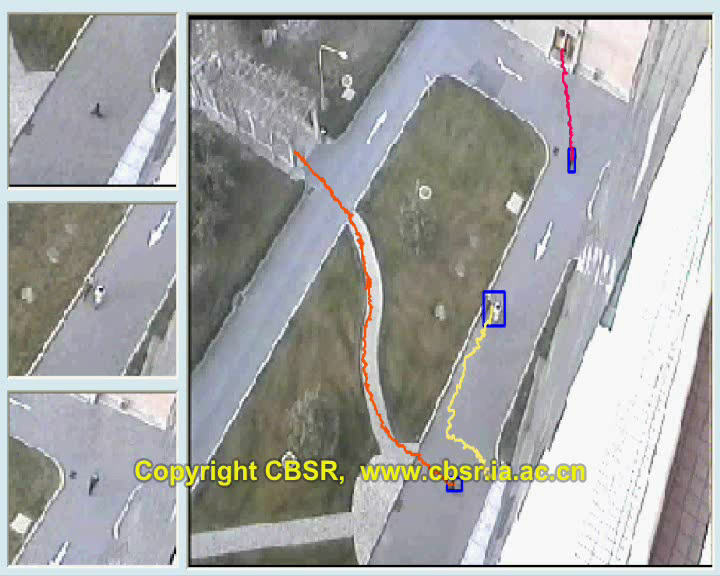
video 本系统的全局监控电子地图功能。本系统采用全景监控地图的形式将在分布在场景中不同区域的摄像机采集和分析得到的运动对象信息及时地显示在二维全景监控地图上,解决了多摄像机信息融合问题,使得监控工作人员对全局有清晰的把握。演示场景是中科院自动化研究所园区四周。画面左侧区域显示的是全局二维电子地图,右侧是两路场景(园区和停车场)视频。每路场景分别进行运动检测和跟踪,得到的对象位置信息通过一定的几何变换投影到电子地图上。地图上的红点是停车场上运动物体,蓝点是园区内的运动物体。同时,两路场景中的运动对象的局部场景分别显示在画面右下方的两个小窗口中,方便用户进行近距离的观测和判断。该全局电子地图功能的实现大大提高了系统的信息融合能力。
|
|
|
|
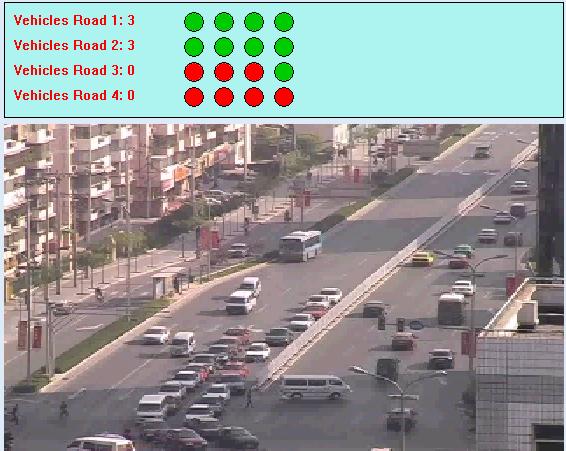
8.Traffic
Jam Detection and Alarming
|
|
|
|
video 演示本系统的多车道车辆计数和拥塞分析功能。画面分上下两块,下方是视频场景,上方是实时的结果显示,其中左边是车辆计数结果,右边是拥塞分析的结果。该场景在大钟寺路口实地拍摄。本演示针对场景中的四个主要车道上行使的车辆进行统计,数目显示在对应窗体中。根据各车道的计数结果,结合对车辆行驶速度的估计,可以检测出当前的拥塞状况。开始时,各个车道都比较通畅,车辆没有堵塞的现象,系统作出判断,显示相应的圆圈均为绿色。一段时间以后,车道一开始拥塞,随着程度的不断增加,对应的显示圆圈开始一个一个变红,直至四个圆圈全部变红。当拥塞状况出现缓解时,红色圈又逐渐变回绿色。其它车道的处理过程类似。在白天、普通天气以及车辆正常行驶的情况下,该系统可以达到90%以上的计数准确性,对拥塞判断也比较符合实际情况。
|
|
|
|
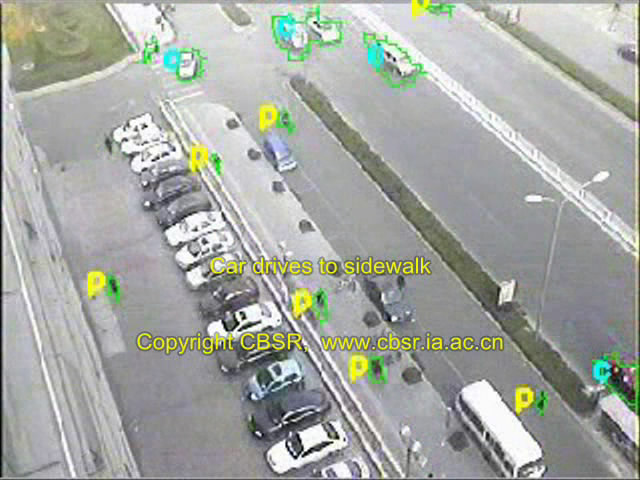
9.Abnormal
Vehicle Behavior Detection
|
|
|
|
video 演示本系统车辆行驶行为异常报警的功能。系统在实时鲁棒的运动检测、跟踪和识别的基础上,对物体的运动信息进行进一步分析,实现了车辆非正常行驶的识别与报警。该演示场景在中科院自动化研究所停车场实地拍摄。系统首先通过背景减除提取运动对象并进行跟踪和目标类型识别。当有一辆白车驶上人行道时,系统自动在该车周围打出两个红色问号,并发出警报声,表示其可能有行驶有异常,需要引起管理人员的注意。当车辆退出人行道的后,问号消失,警报解除。再过一段时间,有一辆黑色的汽车快速在停车场上逆行,系统在其周围打出了两个红色惊叹号,并发出警报声,表示其行驶行为已经发生异常。该报警功能的实现,可以在无人工巡视的条件下自动检测车辆违章行驶,实现高效智能的交通管理。
|
|
|
|
10.
Abnormal
Human Behavior Detection
|
|
  
|
|
video 演示本系统人行为异常报警的功能。系统在实时鲁棒的运动检测、跟踪和识别的基础上,对物体的运动信息进行进一步分析,实现了人异常行为的识别与报警。该演示场景在中科院自动化研究所停车场入口处实地拍摄。画面左侧上方显示监控场景及处理结果,下方是实时提取的背景画面。系统首先通过背景减除提取运动对象并进行跟踪和目标类型识别。当有一个人靠近事先划定的禁区(花圃)时,系统自动在该人周围打出红色问号,开始是一个,然后是两个。当该人真的翻越栏杆进入花圃时,系统在其周围打出两个惊叹号,并发出报警声,表示该人的行为异常。同时,系统将该人的局部场景图象单独显示在画面的右上方,使管理人员可以作近距离观测和判断。
|
|
|
|
11.Target
Tracking in Night
|
|
  
|
|
video 演示本系统夜间跟踪功能。夜间运动对象检测与跟踪是鲁棒的智能监控系统的基本要求之一,也是技术难点之一。本系统采用相关成果,较好的解决了这个难点问题。演示包括三个场景。场景一是夜间拍摄的中科院自动化所模式教学楼前区域。该场景中,有一个人从大楼里面走出来,另外一个人在大楼前跑步。在较低的对比度下,系统仍然准确地检测出这两个运动对象,并保持正确的跟踪。场景二是夜间拍摄的中关村东路路面。该场景下,车辆的灯光将对监控产生一定的干扰,然而本系统同样能够准确地检测出车辆并实现鲁棒的跟踪。以上场景都是由可见光摄像机拍摄,场景三则是近红外摄像机拍摄的夜间园区。可以看出本系统开发的检测和跟踪技术同样可以适用于这种场景,具有较高的实时性和准确性。
|
|
12.Video
Stitching
|
|
  
|
|
video 演示本系统
对图像与视频序列的全景拼接功能,将对周围环境连续拍摄的图像视频序列拼接成全景图像。
|
|
 Back to
main page Back to
main page
|